rpicross_notes
Guide to Cross Compilation for a Raspberry Pi
- Start
- Setup XCS and RPi
- Setup RPi Network and SSH
- Setup RPi Peripherals
- Setup Cross-compile environment
- Cross-compile and Install Userland
- Cross-compile and Install OpenCV
- Cross-compile and Install ROS
- Compile and Install OpenCV
- Compile and Install ROS
- > Remote ROS (RPi node and XCS master)
- ROS package development (RPi/XCS)
- Compile and Install WiringPi
11. Remote ROS (RPi node and XCS master)
TO BE UPDATED. GUIDE MIGHT STILL WORK.
When all previous steps are followed the setup should currently be able to:
- (cross) compile aribtrary c(++)-code
- (cross) compile OpenCV code
- (cross) compile ROS code
- Run the native-compiled code in the VM
- Run the cross-compiled code on the RPi
- Update and synchronise the RPi
- Call OpenCV and ROS functions from Python
- Start/Stop ROS-nodes on both the VM and RPi
The next step is to setup extend the communication functions between the RPi and VM, such that we can run roscore in the VM and connect a node from the RPi.
ROS_MASTER_URI
ROS nodes connect to a master (roscore) via a tcp-connection. This allows a ROS system to have external nodes, hence we should be able to connect the RPi to our VM.
Unfortunally there is a challenge: the VM is configured to be attached to the NAT, therefore it is not visible by any device in the network except the HOST~$. As a result, the RPi is cannot detect the VM and hence cannot connect to the ROS-master (roscore) running in the VM.
The nodes in a ROS system connect to an IP address by communicating with a specific port (by default 11311). When the calls to this port on the HOST~$ are forwarded to our VM and the ROS-master is set to the ip-address of the HOST~$ we can circumvent this problem and have external nodes communicating with the RPi. The setup then becomes:
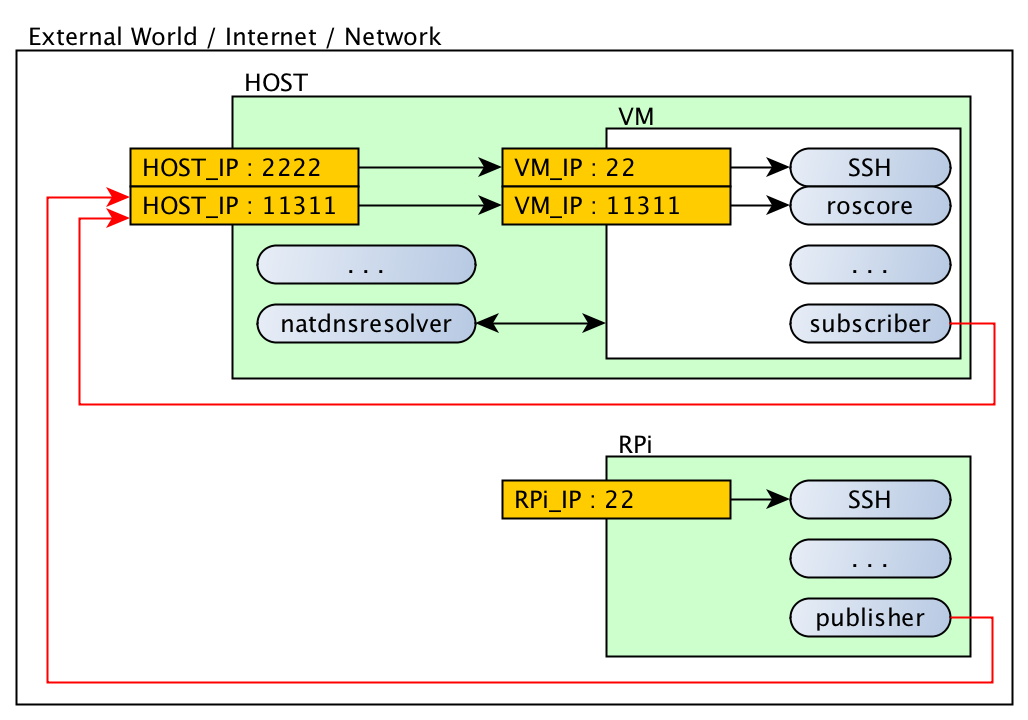
HOSThas an IP namedHOST_IPHOSTforwards port 2222 to 22 in the VM (see Installation)HOSTforwards port 11311 to 11311 in the VMVMhas a (local) IP namedVM_IP. This IP is only accessible by theHOSTVMruns SSH at port 22VMrunsroscoreat port11311.VMruns internal a ROS-node calledsubscriberwhich connects toHOST_IP:11311 (and thereforeroscore)VMcommunicated with thenatdnsresolverof the host in order to resolve dns-names such asrpizw-hessel.local.RPihas an IP namedRPi_IPRPiruns SSH at port 22RPiruns internal a ROS-node calledpublisherwhich connects toHOST_IP:11311 (and thereforeroscore)HOSTandRPiare connected to the same network and are able to connect to each other.
HOST-VM Port forwarding
In a similar manner as the SSH-setting (see Installation), a forward rule in VirtualBox needs to be set. After selecting the VM in VirtualBox:
- Machine > Settings > Network > Advanced > Port Forwarding > New Rule
- Name: ROS_MASTER
- Protocol: TCP
- Host IP: (leave empty)
- Host Port: 11311
- Guest IP: (leave empty)
- Guest Port: 11311
Compilation
- Compile for VM
XCS~$ source ~/rpicross_notes/scripts/ros-native XCS~$ mkdir -p ~/build/ros/chatter XCS~$ cd ~/build/ros/chatter XCS~$ cmake ~/rpicross_notes/ros/chatter XCS~$ make - Compile for RPi
XCS~$ source ~/rpicross_notes/scripts/ros-cross XCS~$ mkdir -p ~/ros/chatter_cross XCS~$ cd ~/ros/chatter_cross XCS~$ cmake \ -DCMAKE_TOOLCHAIN_FILE=/home/pi/rpicross_notes/rpi-generic-toolchain.cmake \ ~/rpicross_notes/ros/chatter XCS~$ make XCS~$ ~/rpicross_notes/scripts/sync-ros.sh
Testing
- First we need to determine the (external) IP (or hostname) of the
HOST~$on which the VM is active. This is the IP on which the ROS-master will be reachable. When using an unix system, the hostname can be determined by:HOST~$ hostname Hessels-MacBook-Pro.localWhile the IP of the host can also be used, in different networks different IPs might be active. Using the hostname of the
HOST~$eliminates this potential issue. - Open three terminals in the VM:
- Source ROS-files and start
roscoreXCS~$ source ~/rpicross_notes/scripts/ros-native <hostname> <rpiname> XCS~$ roscoreThe values
<hostname>and<rpiname>need to be set in order for the RPi to connect properly to the VM via the HOST. This scripts fetches the IP of<hostname>, updatesROS_MASTER_URIlocally, sends the update via~/ros/rossetup-rpito<rpiname>and finally sources ROS files on the VM. For my setup the full command is:XCS~$ source ~/rpicross_notes/scripts/ros-native Hessels-MacBook-Pro.local rpizero-localNote that
roscorecomplains about the IP ofROS_MASTER_URIas it differs from the IP of the VM. More about this in issue #7 . - After starting ROS, start the subscriber-node
XCS~$ source ~/rpicross_notes/scripts/ros-native <hostname> XCS~$ rosrun chatter subscriberNote that we do not need to update the RPi anymore.
- Start publisher on rpi
XCS~$ ssh rpizero-local RPI~$ source ~/ros/rossetup-rpi RPI~$ rosrun chatter publisherThe contents of
~/ros/rossetup-rpiare created by copying and adapting~/rpicross_notes/ros/rossetup-rpiin the VM.
- Source ROS-files and start
- When succesfull, you should see:
- Publisher (RPi):
RPI~$ rosrun chatter publisher [ INFO] [1490361500.794854734]: hello world 0 [ INFO] [1490361500.894476970]: hello world 1 [ INFO] [1490361500.994248202]: hello world 2 [ INFO] [1490361501.094246431]: hello world 3 [ INFO] [1490361501.194246659]: hello world 4 [ INFO] [1490361501.294338885]: hello world 5 [ INFO] [1490361501.394404112]: hello world 6 [ INFO] [1490361501.494347342]: hello world 7 [ INFO] [1490361501.594348570]: hello world 8 ... - Subscriber (VM):
XCS~$ rosrun chatter subscriber [ INFO] [1490361501.387607575]: I heard: [hello world 5] [ INFO] [1490361501.486619994]: I heard: [hello world 6] [ INFO] [1490361501.588621491]: I heard: [hello world 7] [ INFO] [1490361501.688693481]: I heard: [hello world 8] ...Note that some packages are lost..
- Publisher (RPi):
Simplify life
It can become quite tedious to constantly source the ros-files. Luckily we can do this by adding the source command to ~/.bashrc. Upon a ssh-call, ~/.bashrc is loaded by the unix OS, hence the ROS binairies will be sourced automatically.
- Add source-command to
~/.bashrcin the VMXCS~$ nano ~/.bashrcAdd the following to the bottom of the file
# Load ROS biniaries and setup ROS_MASTER_URI source ~/rpicross_notes/scripts/ros-native Hessels-MacBook-Pro.local - Add source-command to
~/.bashrcon the RPiXCS~$ ssh rpizero-local RPI~$ nano ~/.bashrcAdd the following to the bottom of the file
# Load ROS biniaries source ~/ros/rossetup-rpi
So, the steps to execute the example become:
- Open three terminals in the VM:
- Start ros
XCS~$ roscoreIf
ROS_MASTER_URIhas changed, or the RPi has not yet been configured, an initial call beforeroscoreis required:XCS~$ source ~/rpicross_notes/scripts/ros-native Hessels-MacBook-Pro.local rpizero-local XCS~$ roscore - Start subscriber in the second terminal
XCS~$ rosrun chatter subscriber - Start publisher on RPi
XCS~$ ssh rpizero-local RPI~$ rosrun chatter publisher
- Start ros